| 2025.09.22. |
Nine papers have been accepted for iSpaRo at Sendai in 2025 → Publication page NEW! |
| 2024.11.18. |
Two papers were accepted for IEEE/SICE SII at Munich in 2025 → Publication page |
| 2024.05.28. |
Three papers (“Evaluation of the Multi-Pass Effect of an Exploration Rover by Single Wheel Testing Assuming Lunar Gravity and Soil” and others) will be presented at ISTVS, an international conference on vehicle and vehicle dynamics, in Yokohama, Japan, and one paper: “Admittance Control-based Floating Base Reaction Mitigation for Limbed Climbing Robots” at CLAWAR, an international conference on walking and climbing robots held in Kaiserslautern, Germany. Limbed Climbing Robots” was accepted. → Publication page |
| 2023.06.15. |
大阪で開催される日本ロボット学会 2024では,主著共著含め計7件の発表をおこなう予定です.→研究業績 |
| 2023.06.15. |
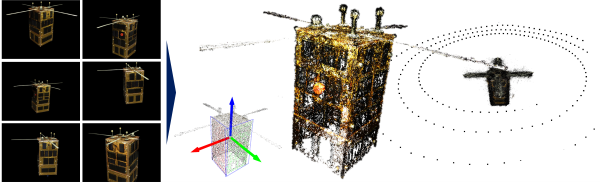
イタリアで開催されるIEEE CASE学会にSfM法を応用した宇宙デブリの運動推定に関する論文が採択されました.→研究業績 |
| 2024.05.28. |
横浜で開催される車両と走行力学に関する国際会議ISTVSに3報の論文(”Evaluation of the Multi-Pass Effect of an Exploration Rover by Single Wheel Testing Assuming Lunar Gravity and Soil”ほか)が,ドイツはカイザースラウテルンで開催される歩行ロボットとクライミングロボットに関する国際会議CLAWARに1報の論文:”Admittance Control-based Floating Base Reaction Mitigation for Limbed Climbing Robots”が採択されました.→ 研究業績 |
| 2024.04.27. |
ルクセンブルクで開催される宇宙ロボット工学の国際会議iSpaRoにおけるワークショップ “Workshop on Exploring the Lunar Frontier Leveraging Robotic Missions” にShort paperの投稿をお願いします! |
| 2024.04.04. |
論文2つが宇宙ロボット工学の国際会議 International Conference on Space Robotics (iSpaRo)@ルクセンブルクに採択されました.→ Publication page |
| 2024.02.06. |
共著論文2つがロボット工学のトップカンファレンス International Conference on Robotics and Automation (ICRA) @横浜にて発表されます.→ Publication page |
| 2023.11.23. |
Our proceedings paper to the International conference ISTVS was selected as a best paper!→ Publication page |
| 2023.11.23. |
国際会議ISTVSに投稿・発表した内容がBest paperを受賞しました!→ 研究業績 |
| 2023.11.18. |
国際会議ICRAEに投稿・発表した内容がセッションアワードを受賞しました!→ 研究業績 |
| 2023.11.06. |
日本ロボット学会誌(レター)に2報,IEEE Robotics and Automation Lettersに1報の論文が採録決定しました!→ 研究業績 |
| 2023.10.23. |
10月17日~20日に富山で開催された第67回宇宙科学技術連合講演会において,ISS船内伝い歩き移動ロボットの開発と地上評価に関する研究成果を発表しました.→ 研究業績 |
| 2023.09.28. |
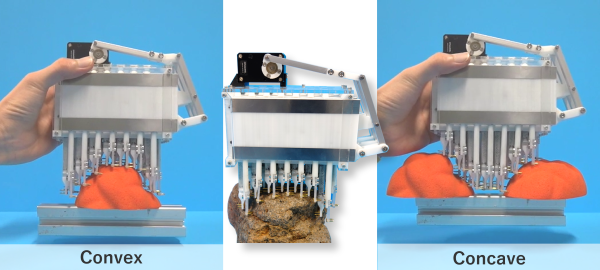
7月11日にオンライン開催された 東北大学 新技術説明会にて「さまざまな凹凸形状をつかめるピン配列型把持機構」という発表をおこないました(同技術については特許出願済).→ [YouTube] |
| 2023.09.01. |
9月11日~14日に仙台で開催される日本ロボット学会学術講演会 2023では,計6件の発表をおこないます.→ 研究業績 |
| 2023.08.01. |
Please check our latest paper about high-speed rover development: “Enabling Faster Locomotion of Planetary Rovers with a Mechanically-Hybrid Suspension”! |
| 2023.07.19. |
研究業績 を更新しました. |
| 2023.06.30. |
名古屋で開催されたロボティクス・メカトロニクス講演会 2023にて,所属研究室から3件の発表をおこないました.→研究業績 |
| 2023.05.31. |
Our proceedings paper in ICRA “RAMP: Reaction-Aware Motion Planning of Multi-Legged Robots for Locomotion in Microgravity” was selected for the ICRA 2023 Outstanding Locomotion Paper Finalist as well as the IEEE RAS Japan Joint Chapter Young Award (ICRA2023)!! (Publication page) |
| 2023.04.11. |
研究助成に関する情報を更新しました( 経歴 ) |
| 2023.03.16. |
研究助成に関する情報を更新しました( 経歴 ) |
| 2023.01.20. |
Roboticsのトップ国際会議 ICRA にてWorkshop: “Heterogeneous multi-robot cooperation for exploration and science in extreme environments” をハイブリッド開催します. |
| 2023.01.20. |
Roboticsのトップ国際会議 ICRA に共著論文 “RAMP: Reaction-Aware Motion Planning of Multi-Legged Robots for Locomotion in Microgravity” がアクセプトされました.( 研究業績 ) |
| 2022.11.16. |
国際会議 IEEE ROBIO と IEEE Aerospace Conference に共著論文1報がそれぞれアクセプトされました.( 研究業績 ) |
| 2022.10.15. |
研究業績 と Project page を更新しました. |
| 2022.09.29. |
ウェブページを刷新. |
| 2021.11.02. |
システムインテグレーション国際会議(SII)に共著論文1報が,第33回 宇宙技術および科学の国際シンポジウム(ISTS)に共著論文2報がそれぞれアクセプトされました.( 研究業績 ) |
| 2021.10.01. |
東北大学大学院工学研究科の助教として着任いたしました.引き続きよろしくお願いいたします.( 経歴 ) |
| 2021.09.07. |
共著学術論文 “Analysis of Motion Control for a Quadruped Ground-Gripping Robot for Minor Body Exploration on Uneven Terrain” が TRANSACTIONS OF THE JAPAN SOCIETY FOR AERONAUTICAL AND SPACE SCIENCES, AEROSPACE TECHNOLOGY JAPAN(日本航空宇宙学会による国際学術論文集)にて発行されました. ( 研究業績 ). |
| 2021.09.02. |
国際会議CLAWAR 2021において脚型クライミングロボットのシミュレータ開発に関する論文 “ClimbLab: MATLAB Simulation Platform for Legged Climbing Robotics” がHigh Commended Paperに選ばれました! ( 研究業績 ). |
| 2021.08.31. |
研究業績 を更新. |
| 2019.11.18. |
日本語の研究業績ページ と 日本語の連絡先 を追加. |
| 2019.11.13. |
日本語のカバーページ を追加. |
| 2019.11.08. |
LinkedInのリンクを追加. |
| 2019.11.04. |
ウェブページを刷新. |
| 2019.09.11. |
経歴,業績を更新. |
| 2019.03.20. |
ホームページ開設. |